Human-centered form factor
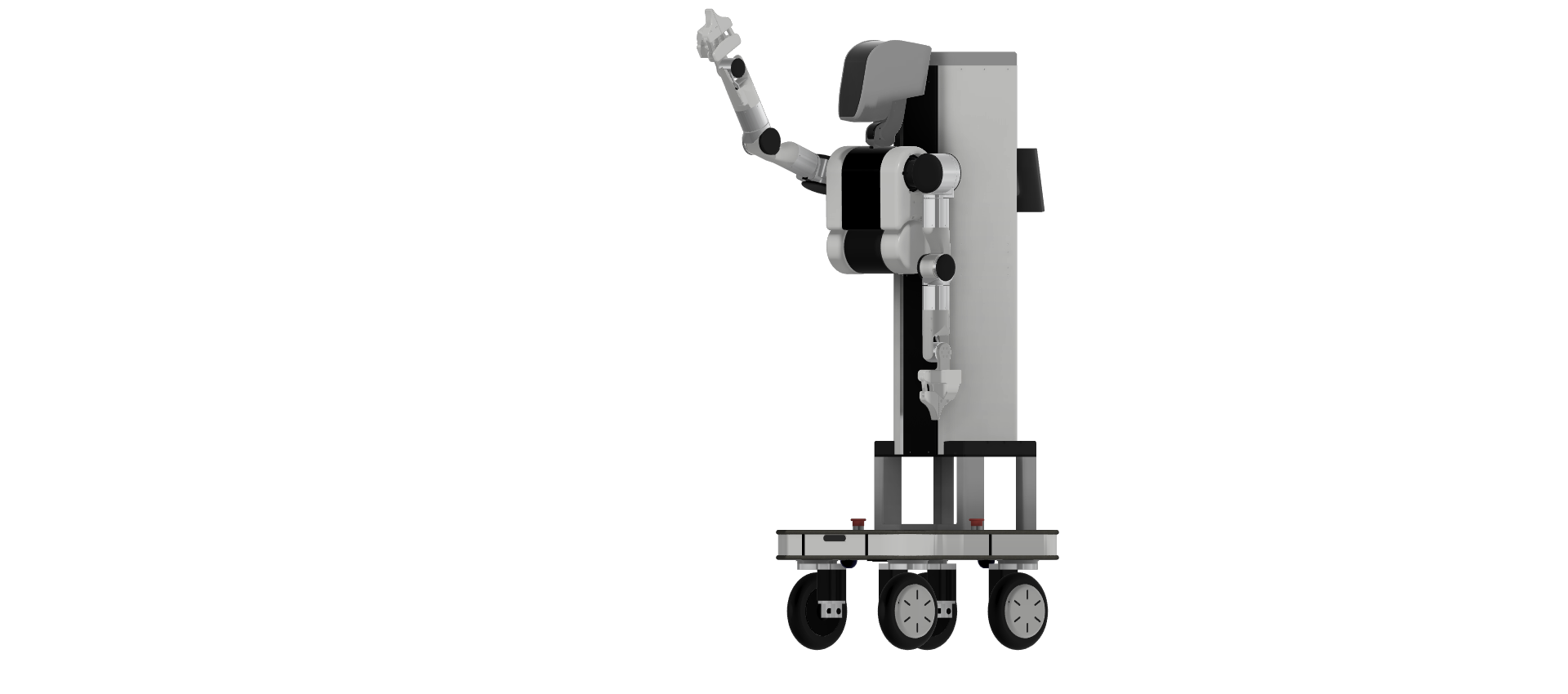
人間環境に合わせた作業導線を前提に 上半身ヒューマノイドを中核に据える
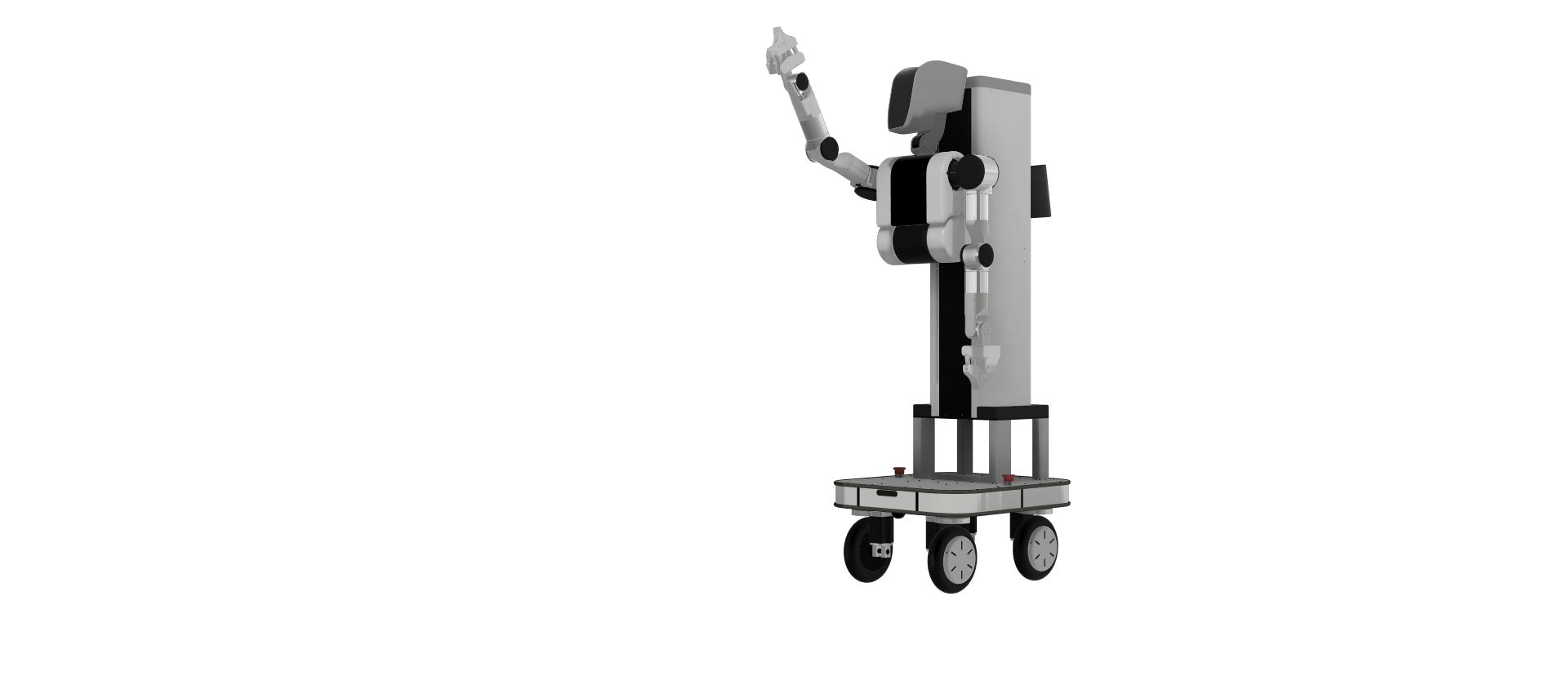
AGIRobotsが開発するセミヒューマノイド・プラットフォーム
上半身ヒューマノイドと専用台車を組み合わせ、移動、把持、遠隔介入、模倣学習用データ収集までを一体で扱う
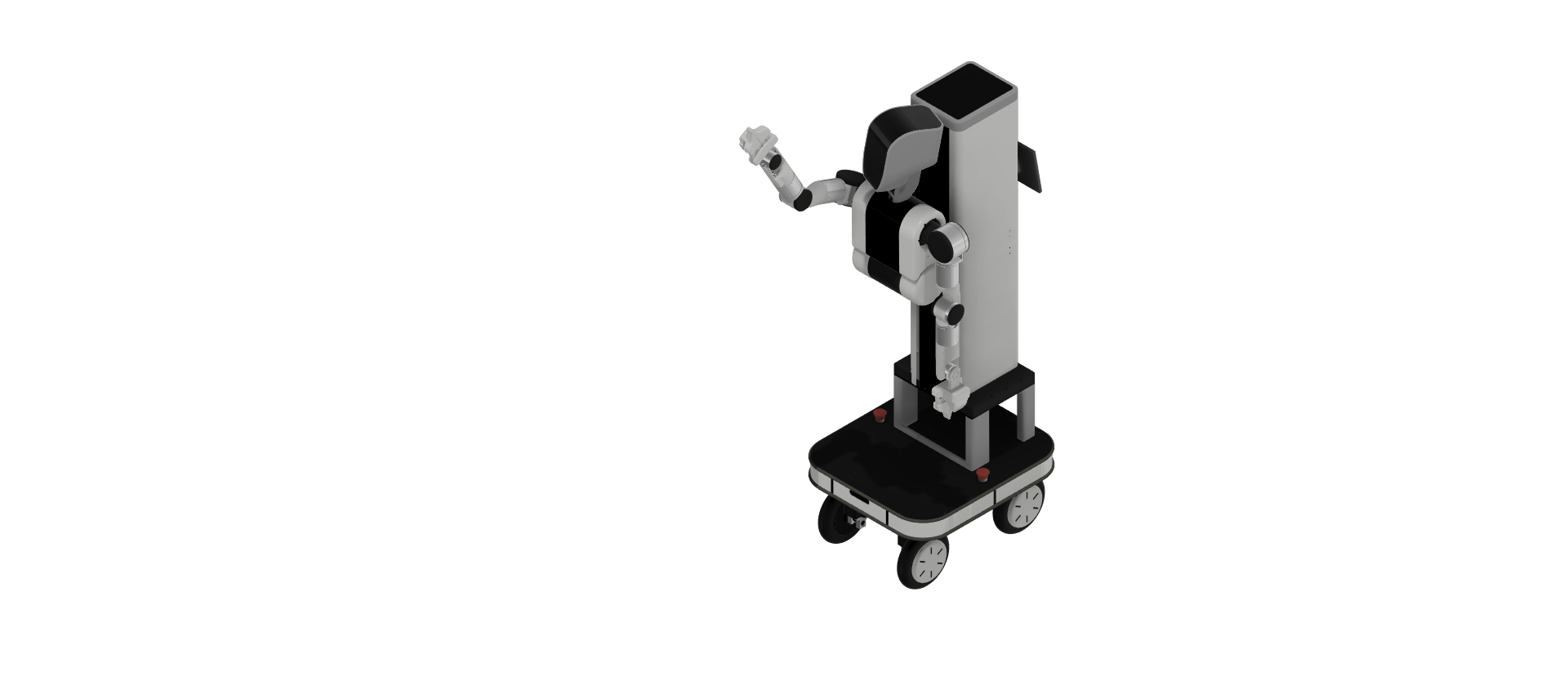
上半身試作機の開発を進めるとともに、専用移動機構を備えた移動型上半身ヒューマノイドロボットとしての実装を進めている
人間環境に合わせた作業導線を前提に 上半身ヒューマノイドを中核に据える
まだ試作機ながら 現場ヒアリング 導線検証 データ取得を含むPoCを進められるレベルで仕上げる
現行機から順国産化を進め 将来的には自社製モータを含む国内開発スタックとして完成度を高める
現時点では量産機ではなくプロジェクト対応型であり、受注後2〜3ヶ月程度でPoCを開始できる体制を想定している
対象ワークや工程に応じてハンド設計を調整し、導入検討時に求められる仕様へ柔軟に対応する
AGIRobots Workerは開発中のプロダクトであり、機体デザイン、ハンド構成、内部レイアウト、搭載部材は今後変更される可能性がある
国内開発を進めることで、開発、保守、仕様調整、現場サポートまでを国内で一貫して進めやすくしている
AGIRobots Workerは、機体単体ではなくAGIRobots Studioとの統合を前提に設計しており、データ収集、学習、デプロイ、運用までを一連の流れとして扱える構成としている
AGIRobots Studio、AGIRobots Studio Go、AGIRobots VRを通じて、設定、監視、更新、遠隔介入を 一つの製品体系として扱えることも、AGIRobots Workerの特徴の一つ
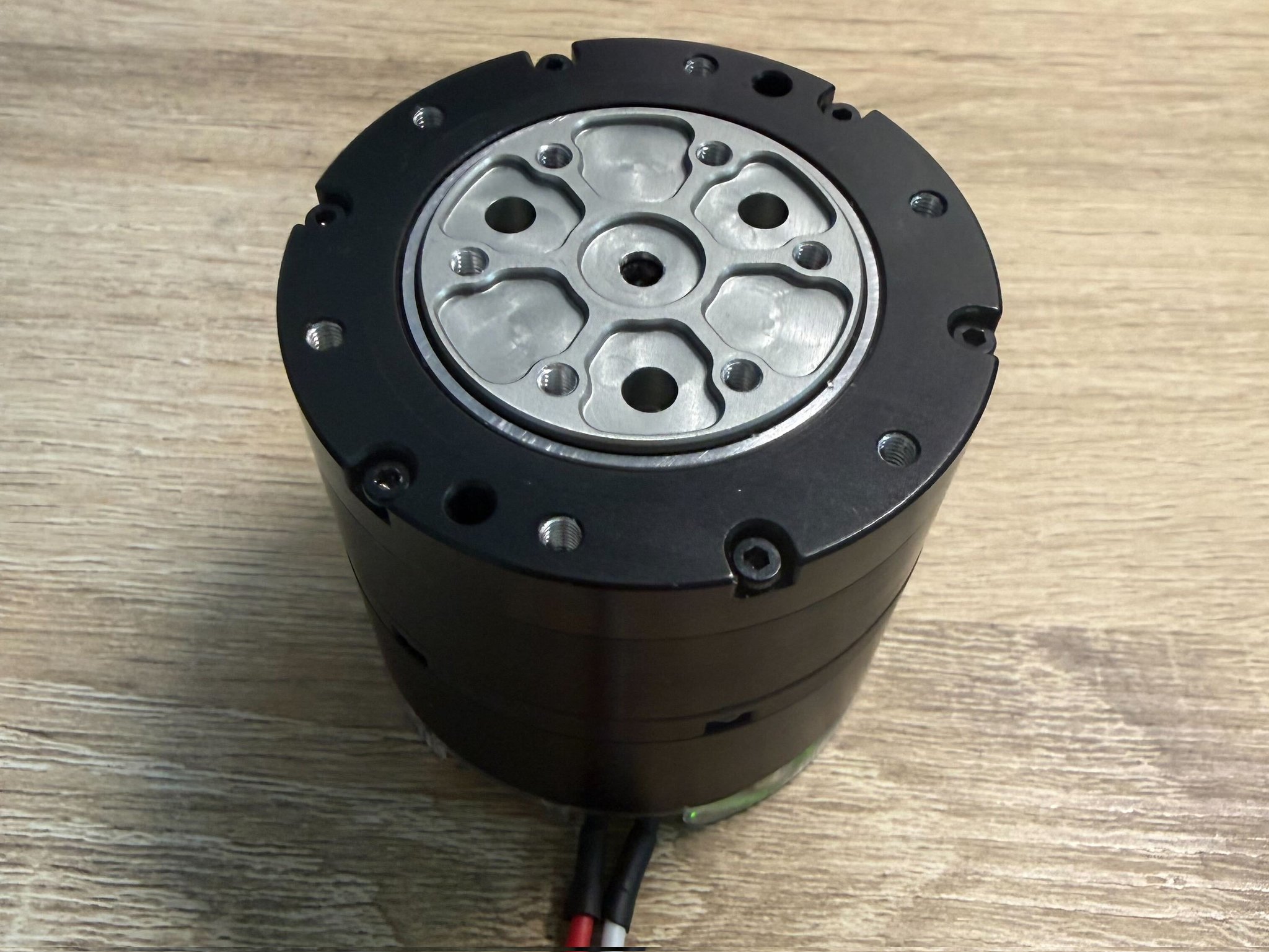
現在の開発では一部に他社製アクチュエータを採用しつつ、次期バージョンでは自社モータ採用構成も視野に入れている
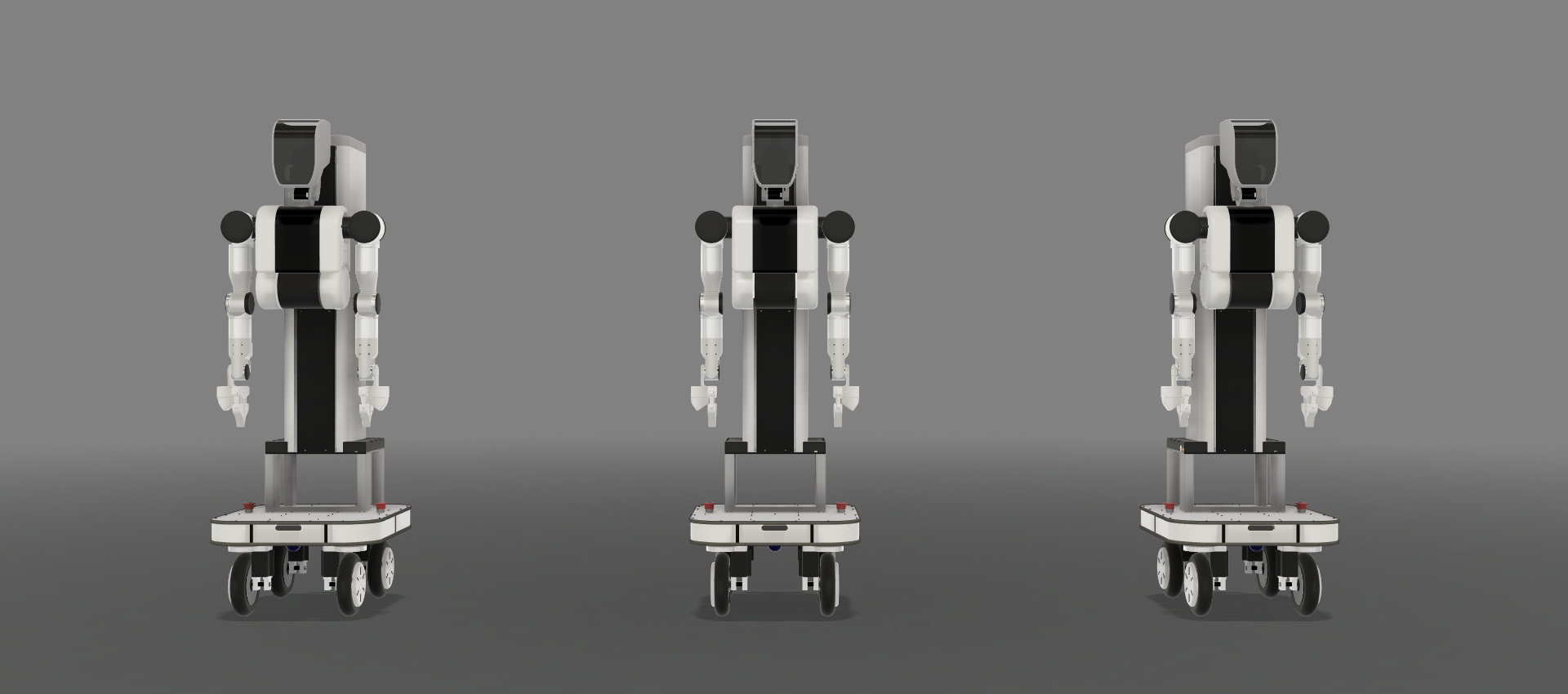
AGIRobots Workerは、日本の製造・物流現場で求められる「安定した移動」と 「確実なピッキング」を、既存レイアウトを大きく変えずに導入することを目指している
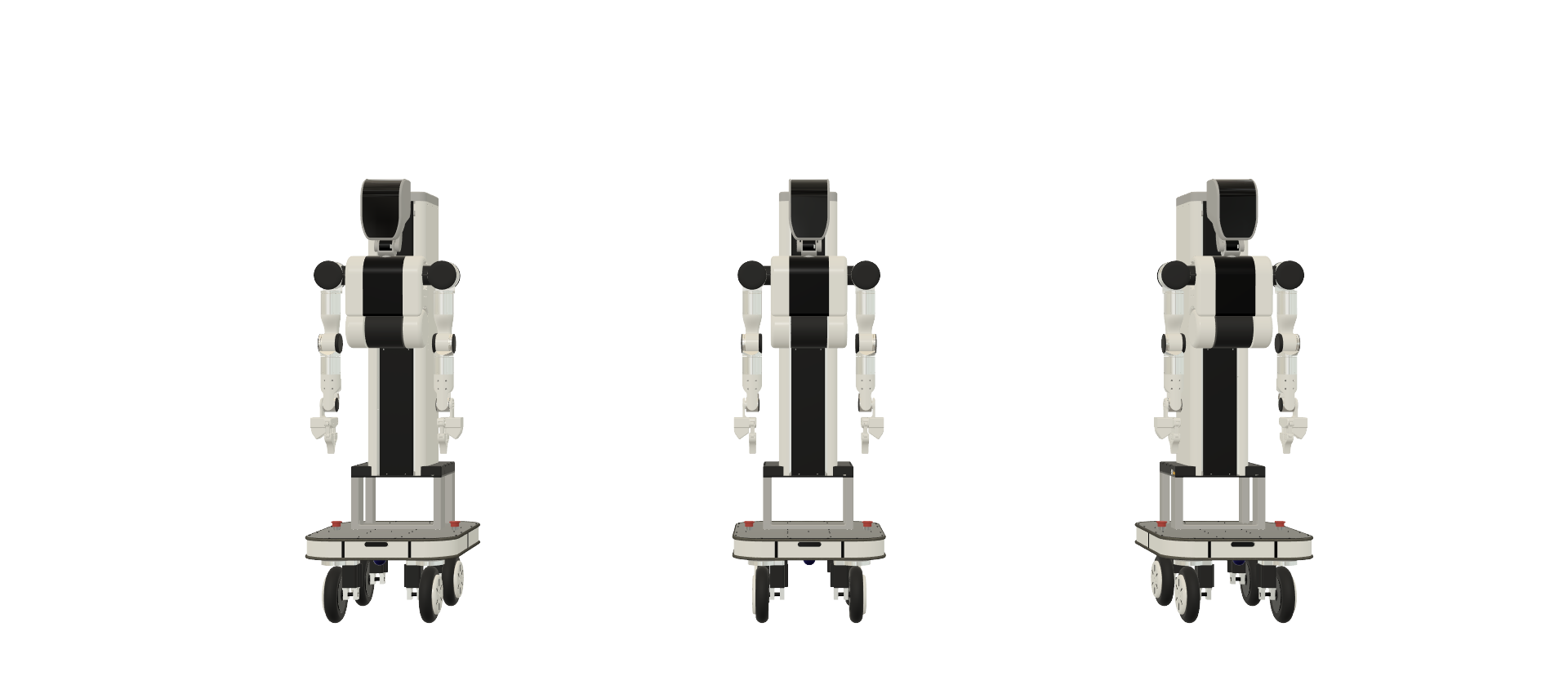
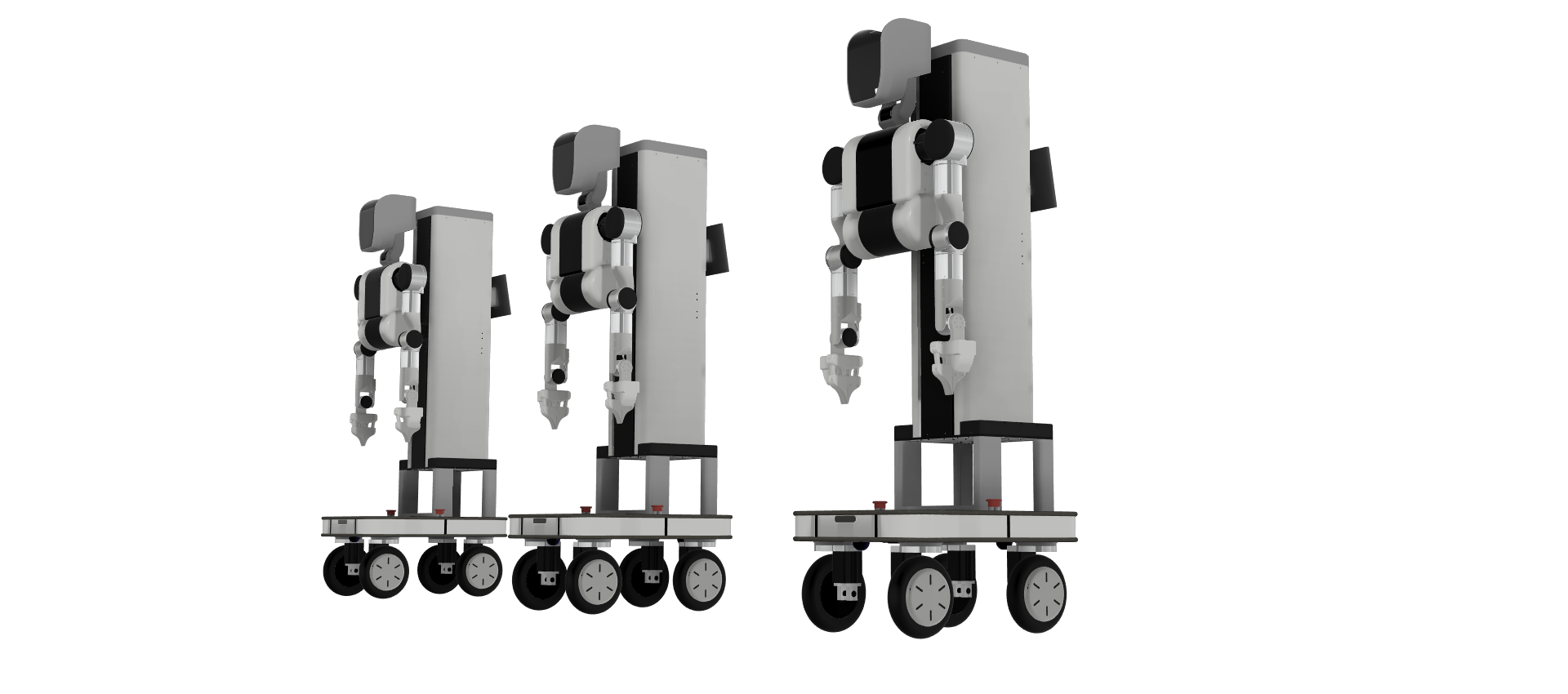
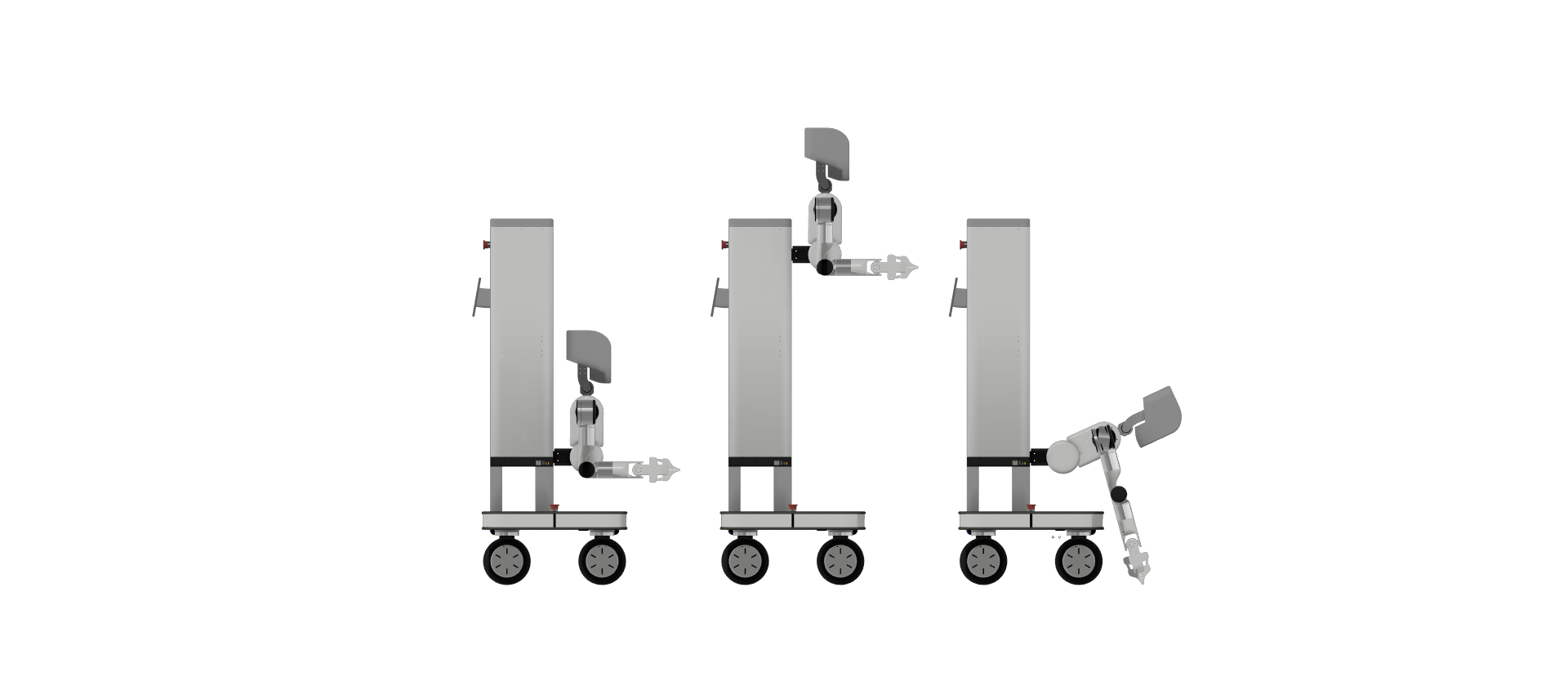
`現行試作構成` と `高ペイロード構成` を並べて掲載し、 現在の仕様と今後の発展方向をあわせて掲載している
現行試作構成では2 kg級、自社開発アクチュエータ採用版では5 kg級の片腕可搬を想定している
| 項目 | 現行試作構成 | 高ペイロード構成 |
|---|---|---|
| 外形寸法 | 不明、後日計測予定 | 不明、後日計測予定 |
| 総重量 | 不明、後日計測予定 | 不明、後日計測予定 |
| 総可動軸数、エンドエフェクタ除く | 25軸、腰軸搭載時26軸 | 25軸、腰軸搭載時26軸 |
| 片腕自由度 | 7自由度 | 7自由度 |
| 片腕可搬重量 | 2 kg級、設計理論値 | 5 kg級対応設計 |
| アクチュエータ構成 | 現行試作構成 | 自社開発アクチュエータ採用 |
| 将来拡張 | — | 10 kg級対応を検討中 |
| 昇降軸 | 1軸 | 1軸 |
| 腰軸 | オプション | オプション |
| 首自由度 | 2自由度 | 2自由度 |
| 台車構成 | 4輪駆動・4輪操舵 | 4輪駆動・4輪操舵 |
| 上下昇降速度 | 後日計測予定 | 後日計測予定 |
| 最大移動速度 | 後日計測予定 | 後日計測予定 |
| 計算機構成 | Jetson × 2、Raspberry Pi × 1 | Jetson × 2、Raspberry Pi × 1 |
| カメラ | 頭部カメラ × 2、左右リストカメラ × 1ずつ | 頭部カメラ × 2、左右リストカメラ × 1ずつ |
| ディスプレイ | 頭部ディスプレイ、背面ディスプレイ | 頭部ディスプレイ、背面ディスプレイ |
| コントローラー | 付属 | 付属 |
| ソフトウェアアップデート | 対応予定 | 対応予定 |
| SDK / 二次開発 | 対応予定 | 対応予定 |